Este equipo se encuentra instalado en el Laboratorio de Investigación de Biomecánica y Robótica Aplicada (LIBRA-PUCP), de la Sección Ingeniería Mecánica, y se adquirió a través del Concurso de Equipamiento Científico para Laboratorios, organizado por FINCyT.
El Dr. Dante Elías, director de LIBRA-PUCP, comentó que el equipo es único en el país y que, a la fecha, ha permitido establecer vínculos con el Dr. Peter Reeves, del Center for Orthopaedic Research de la Michigan State University (MSUCOR). Asimismo, explicó que «»este equipo permite ampliar las capacidades para estudiar aplicaciones biomecánicas de gran complejidad, como son el balance postural, el movimiento cervical, y de articulaciones (rodilla, tobillo, cadera, etc.), y/o desplazamientos con trayectorias exigentes para el cuerpo humano en general. Además, se pueden estudiar condiciones de carga con movimientos complejos para el desarrollo de simuladores de entretenimiento (juegos mecánicos), entrenamiento (pilotos), condiciones de ensayo bajo carga combinada (flexión y torsión), ensayo de prototipos de antenas de satélite móviles, etc.»».
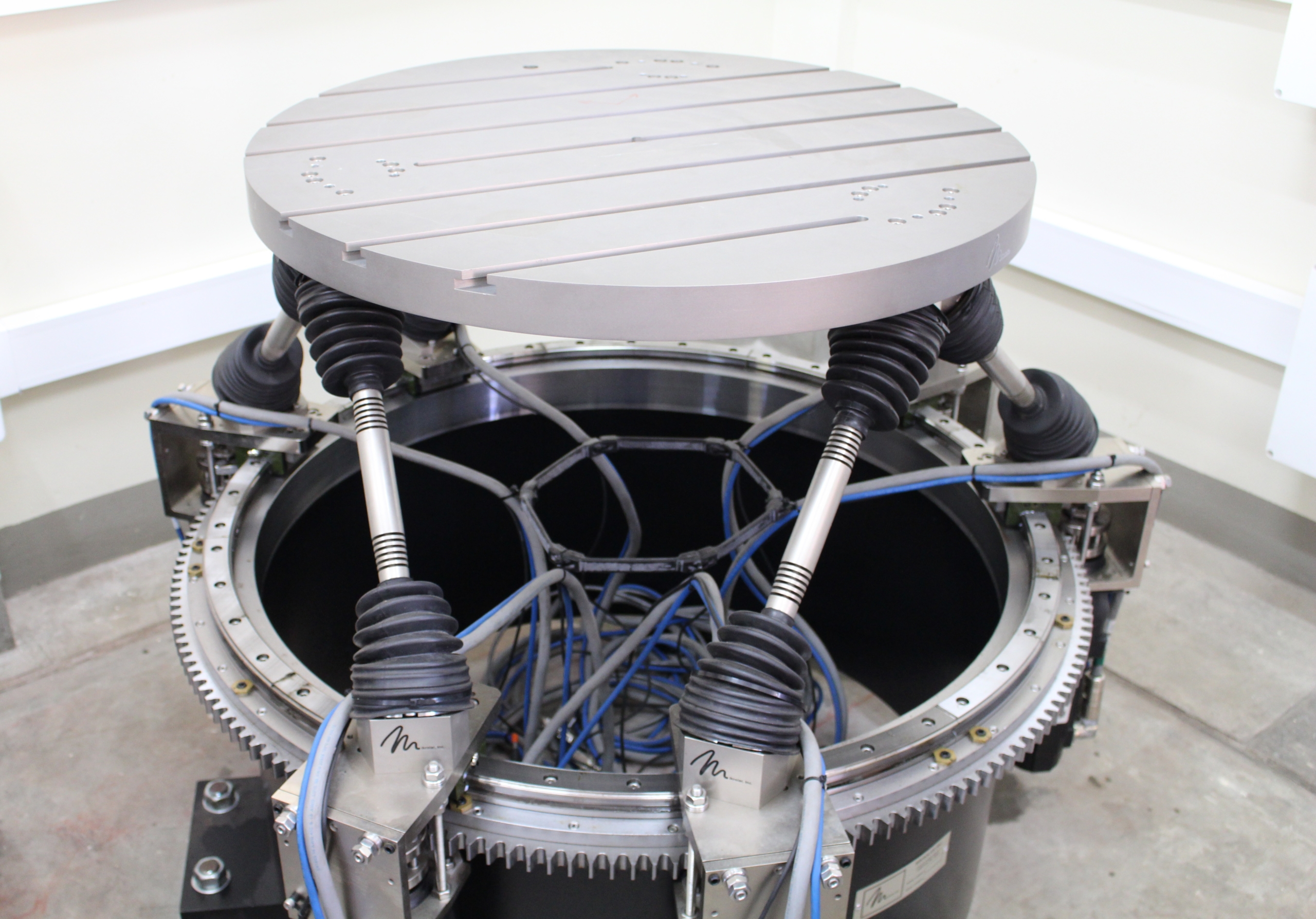
El Rotopod es un Robot Hexápodo, que tiene una plataforma de seis grados de libertad con posibilidad giratoria de 720 grados alrededor del eje vertical y con capacidad de carga de 100 kg. Esta plataforma robótica posee un espacio de trabajo de 180 mm de diámetro y eje vertical de 150 mm, con inclinación de +/- 15 grados, velocidad de 100 mm/s por cada eje cartesiano. Posee un software que permite realizar movimientos con cargas variables sin modificar la configuración instalada para movimientos repetitivos con una relativa facilidad de modificación de parámetros.